
|
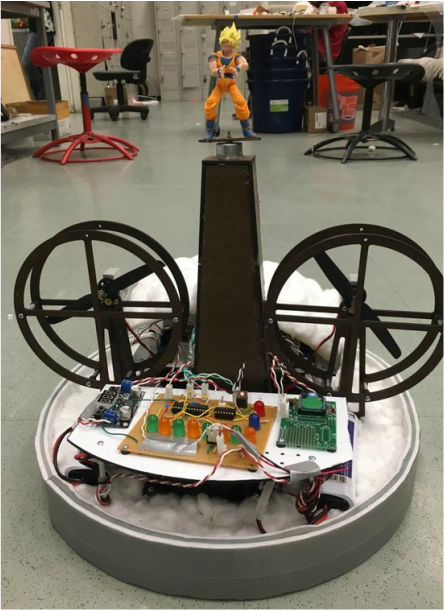
IntroductionThe Saiyan was a Remote Controlled Hovercraft built by Addarsh Chandrasekar, Shawn Gao, Akshay Shankar and Kaiyuan Zhu as a L.O.B.B.Y.I.S.T (Loyal Only By BriberY Influence Spreading Technology) accompanied by a wireless P.A.C (Political Artillery Controller) in Stanford's ME218C Spring Project for the 2015-2016 academic year.
|
Game ObjectiveThe game field consisted of a bounded 4 sided polygon consisting of two 'goals' for the Red and Blue time on opposite sides of the field. At any moment 4 LOBBYISTs (hovercrafts) were on the field being controlled by 4 of 6 PACs (controllers) resulting in a 3v3 hovercraft soccer game.
Every PAC was allowed to connect to a LOBBYIST for a maximum of 45 seconds after which the controller would have to pair with a different hovercraft. After the end of each round the number of balls in each goal were counted, and the team with the most goals was declared winner. |

|

|
Our Project Goals We aimed at the following goals throughout the course of the project:-
1. To be controllable : While researching over hovercraft skirt designs we noticed that creating a hovercraft with low friction with the movement surface was easy (based on material selection and design). However, for these cases the hovercraft had exaggerated drift on forward movement along with sensitive steer that would often send the hovercraft into spirals. To prevent this our team, decided to utilize HDPE plastic which has a higher friction coefficient than other options such as Rip Stop Nylon. In addition, we decided to reduce the volume of inflation to just enough that could keep the hovercraft elevated and driven without any unwanted pitching angle. 2. To be durable : The craft was required to be durable on varied surfaces and able to tolerate bumps or hard contact by other hovercrafts in the arena. For this we equipped our LOBBYIST with foam composite bumper. 3. To involve the user : We wanted our controller to be something that an arbitrary user could easily grasp and would be previously used to, while also incorporating the element of fun. For this, the forward and reverse was controlled using joysticks mounted on the PAC. The steer was controlled using the Saiyan scouter (Eyepiece) with a gyroscope mounted inside it. The inflation and deflation of the hovercraft was controlled by pitching of one's face sensed by an accelerometer in the scouter as well. This motivated to the user to involve all controllable limbs except for his/her's legs. 4. To exercise our mechatronics knowledge : As this project marked the culmination of our ME218C course we wanted to be able to showcase all the knowledge we have gained throughout the span of the course in this one project, with communication as the highlighted topic. 5. To fulfill dreams : Every single child who has grown up in the 90's (including our team members) watching Dragonball or DragonBall Z has always dreamed of what it is like to hold a Dragon Ball or wear the infamous Saiyan Scouter used to detect the power levels of the universe's mightiest heroes. Through this project we wanted to give our users an idea of how that experience would feel like. |
